VEX is an arm under Robotics@ Apex in SST.
In my two years in VEX robotics, I have joined the
2022-2023 Spin Up season and the
2023-2024 Over Under season.
About VEX Robotics
In VEX robotics, I participated under the VRC category where we used the V5 system and were limited to:
- 18" x 18" x 18" robot
- 8 motors
- limited expansion of bot parts.
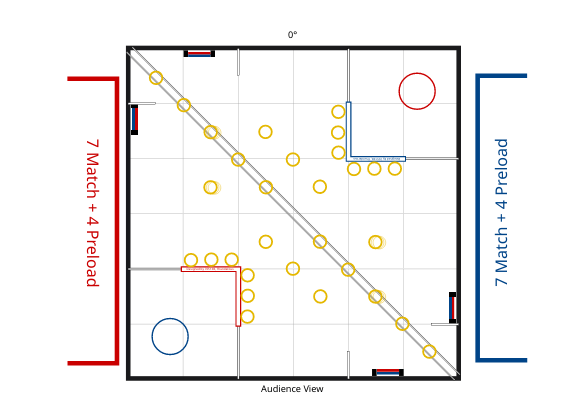
The game is played on a 12' x 12' field with walls on all 4 sides.
*(dimensions are in imperial because VEX is an American based competition)
Gameplay
- VEX is played in a 2v2 format where each team (alliance) has 2 robots on the field.
- The game is played in a 15 second autonomous period followed by a 1 minute 45 second driver controlled period.
- In the last 30 seconds of the game, there are ways to obtain bonus points which vary across competitions.
- There is also a subsection of VEX called VEX Skills where teams compete to get the highest score in a 1 minute autonomous period and a 1 minute driver controlled period.
2022-2023 Spin Up
The Spin Up season was my first time participating in VEX robotics.
I was a fresh trainee and had to learn everything from scratch ...and to be honest I didn't do much during the season, I was too scared that I would mess up the robot.
This wasn't helped by the fact that this was the first VEX competition that our school was participating in after a 3 year break and the pandemic.
All 5 members of the team were new to VEX and we each had our own struggles.
Game Overview
At the simplest level, Spin Up requires a robot that can pick up discs and shoot them into a goal.
The two alliances (red and blue) on opposite sides of the field have to shoot discs into their respecive goals.
In Spin Up there are multiple ways to score points:
- shoot discs into the high scoring zone (5 points)
- push discs into the low scoring zone (1 points)
- Rotate rollers at the edges of the field to score points (10 points)
- Endgame robot expansion (3 points for each tile covered)
- Autonomous Period bonus (10 points)
Robot Design
The robot was a simple 4 wheel drive with a single motor flywheel shooter and single motor intake array.
Planning
This image shows a picture taken during the planning phase of the robot. It was a sketch on where we wanted the flywheel and the structure we needed to build it.
Testing
Intake Array
Testing the intake subsystem of the robot.
It didn't work as intended, the discs kept getting stuck in the intake array.
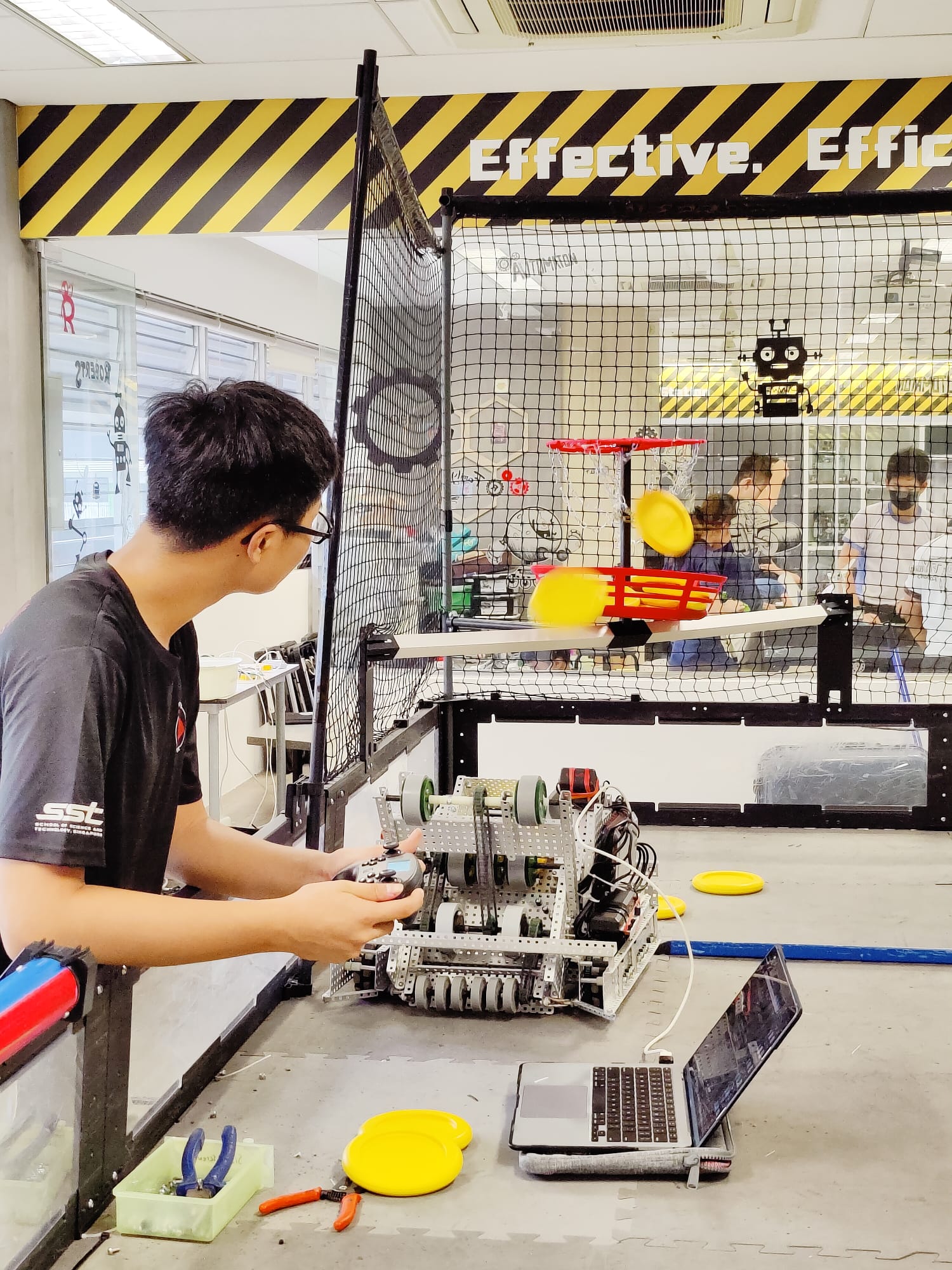
Flywheel
Testing the outtake subsystem of the robot.
The flywheel worked, however, it took a long time to Spin Up and reduced cycle time.
Final Robot
Shoutout to Zachary, my teammate who built the flywheel.
Reflections
During the final competition, we did not fare too well.
Our robot was not able to shoot the discs into the goal and we were not able to score many points.
However, looking at all the other robots, I realised that we were not the only ones who struggled. We were able to learn from the winners and see what we could improve on for the next season as well as made new friends from other schools and strengthen the VEX community in Singapore.
2023-2024 Over Under
The Over Under season was my second time participating in VEX robotics.
This time I was more confident in my abilities and took on a more active role in the team.
As I became the ExCo of the club and entered Secondary 3, I had to juggle between my responsibilities and competitions.
This season was also the first time that our school had 4 teams participating in VEX robotics.
My group was made up of 5 members, 4 of which were my juniors whom I had the pleasure of working with for a year. Seeing them grow as we shared highs and lows pulls at my heartstrings.
I am proud of the work we did and the bot we built together.
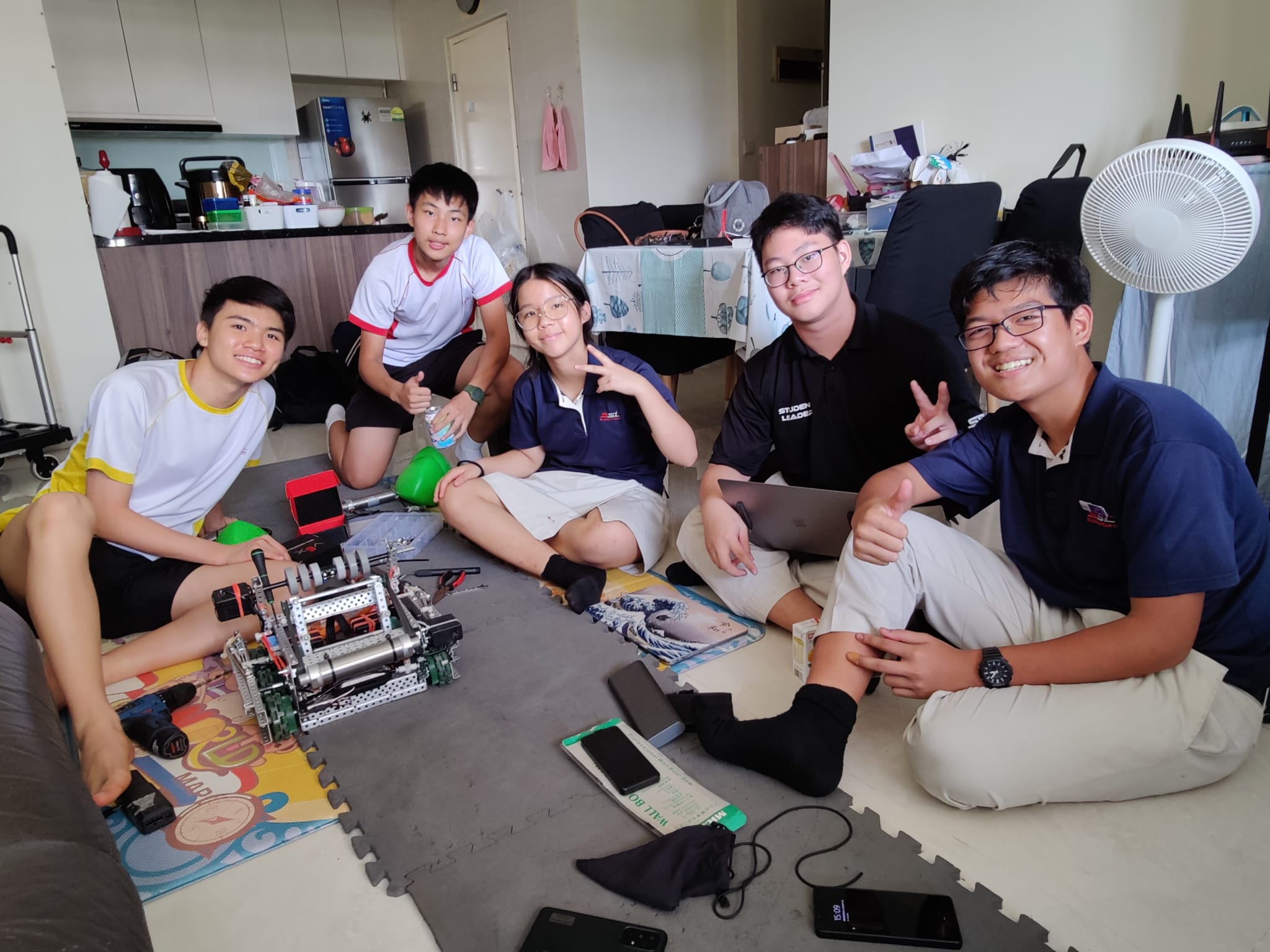
Humans (left to right):
Klifton (me), Jian An, Ying Xuan, Jayden, Kevin
Game Overview
Over Under is a game where robots have to pick up triangular shaped balls (triballs) and place them in goals.
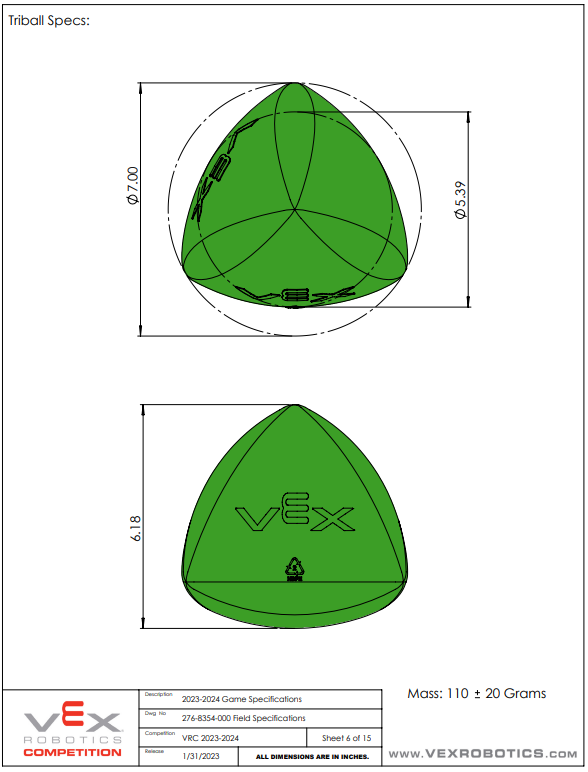
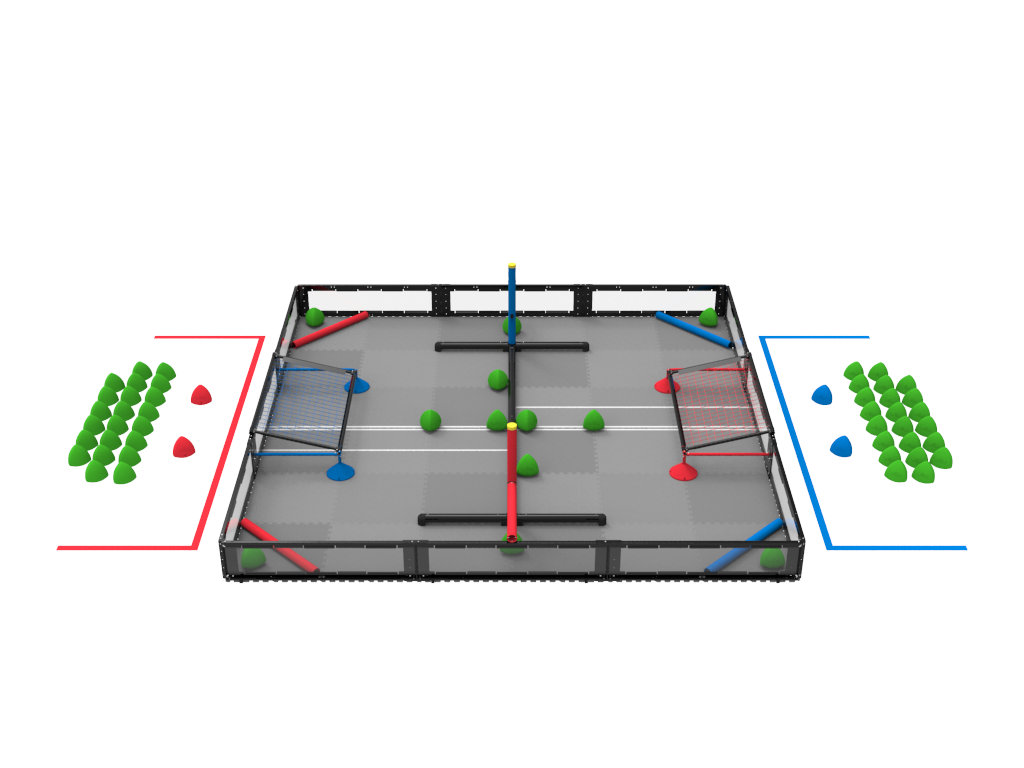
Of the 60 Triballs Availible, 12 of which are on the field.
The two alliances (red and blue) on opposite sides of the field have to shove the triballs into their respective goals.
In Over Under there are multiple ways to score points:
- Triballs in goals (5 points)
- Triballs on your side of the field (2 points)
- Endgame robot hang on pipes
(20 points for highest elevation, decreasing in 5 points for each elevation level) - Autonomous Period bonus (8 points)
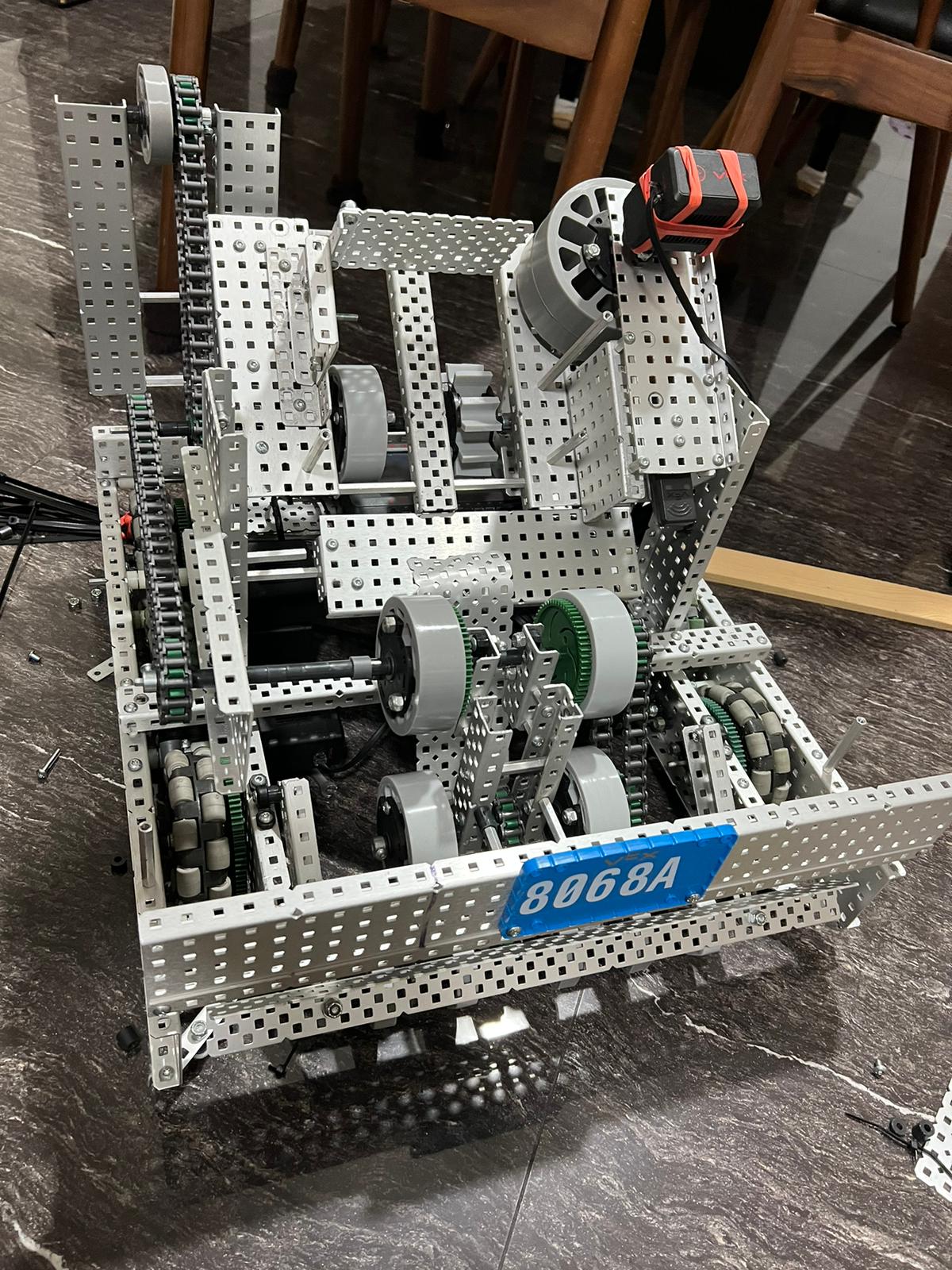
Robot Design
Planning
This time... we planned... On paper and not in a span of 30 seconds.
This is a sketch of our robot and ideas for a catapult and intake array.
Of course this was just an idea and not much of it was implemented in the final robot design.
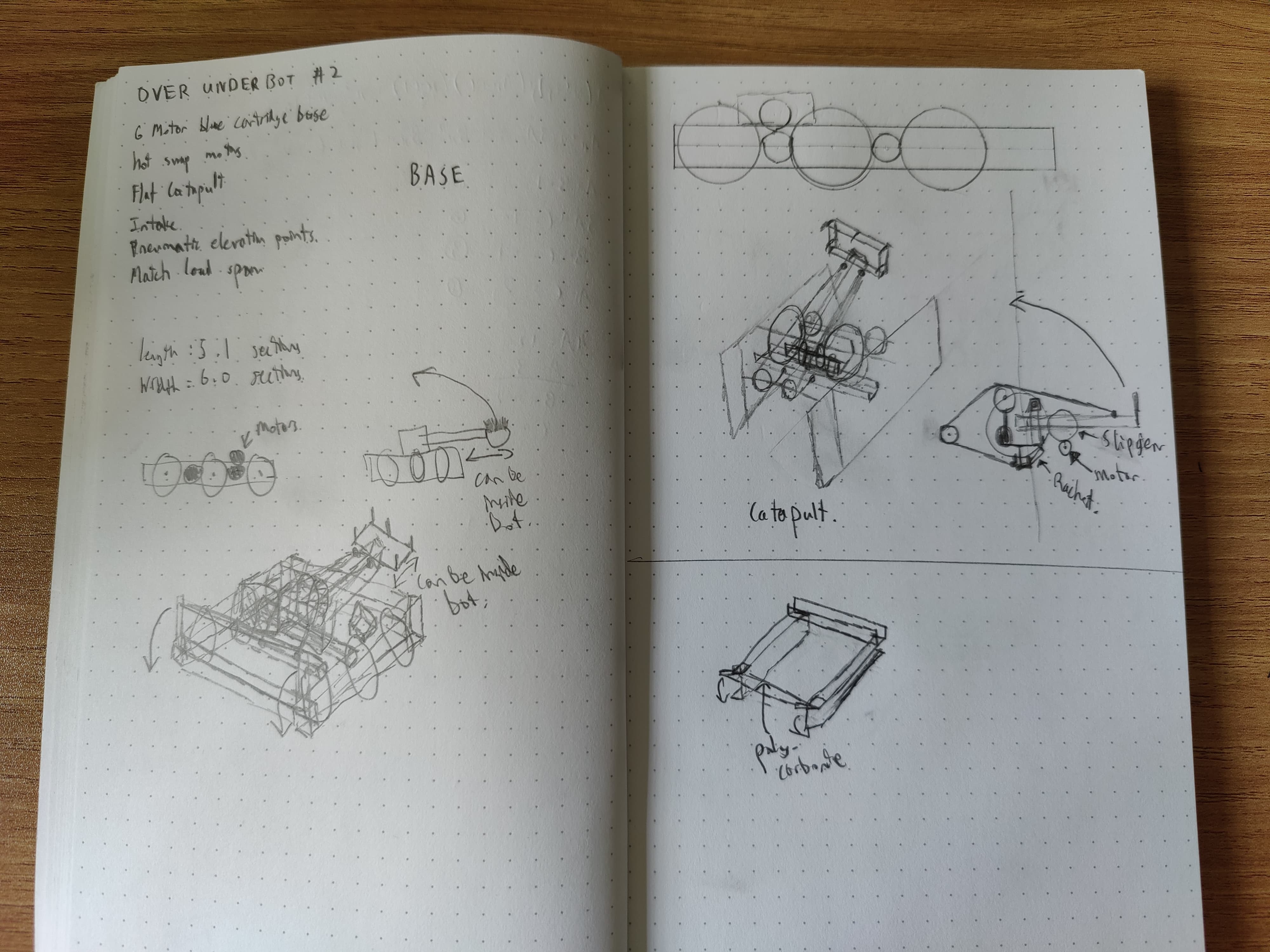
One thing we could improve is that after sketching the robot, we should make a 3D CAD model of it to see how parts work together and if there are any interferences.
Testing
Intake Array
This video showcases the intake capabilities of the robot, it was able to pick up the triballs and store them in the robot. Although we didn't manage to get it working 100% of the time, it was deemed good enough for match.
Catapult
This was an early build of our catapult — or flatapult depending on how you look at it — that was able to shoot the triballs near the goal.
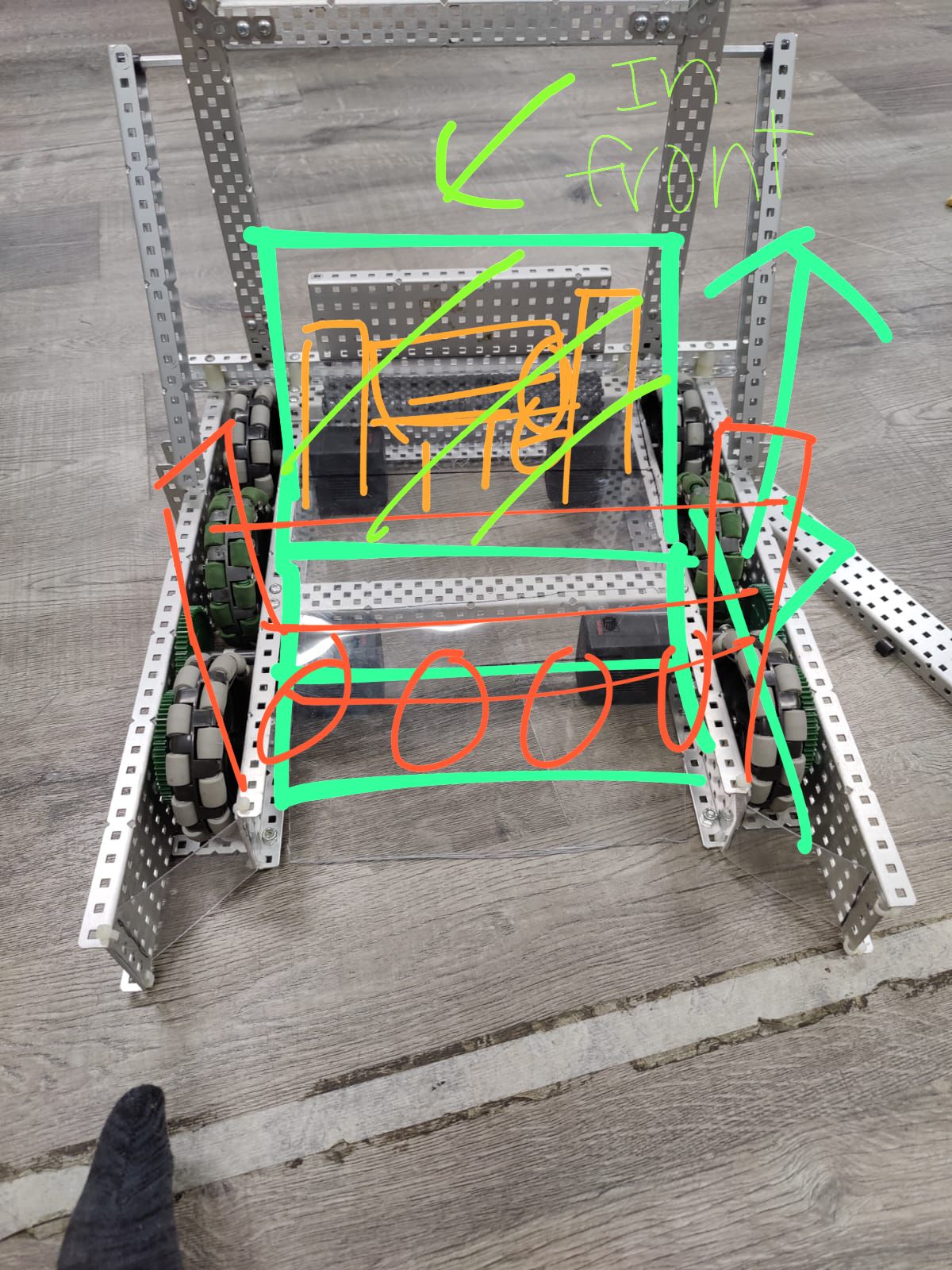
Boat Drive
This section is called boat drive because it gives the robot the ability to move over small obstacles. In this case, the robot was able to move over the middle bar.
This made it easy for the robot to move around the field and score more points.
Final Robot

^^^ The cutest version of our robot, we called it Bob.
Skills planning
For this season, we were calmer in approaching the game. We realised that a way to score points was to focus on the skills section of the game.
Reflections
After competition we realised that taking into account the 'meta' of the game is important. However, we learnt that its not coming up with the 'meta' that is important, its coming up with a bot that can counter the 'meta'.
In Over Under, our final competition didn't go as we had planned, all of the members were tired and since the competition was at the beginning of the next year, all of us had new roles in the next stage of our education. But in the end we still tried our best, and it was an amazing year we had competing together .
*meta: 'most effective tactics available'